2026-04-15
智能工廠自動化解決方案
AGV 機構設計實戰:如何精準選用底盤驅動與頂升馬達?
AGV 機構設計實戰:如何精準選用底盤驅動與頂升馬達?
告別低速抖動與原點復歸困擾,東方馬達 BLVD 與 AZ 系列的最佳配置解析
一台穩定且容易維護的 AGV,關鍵往往在於初期的「馬達選型」與「通訊架構」。
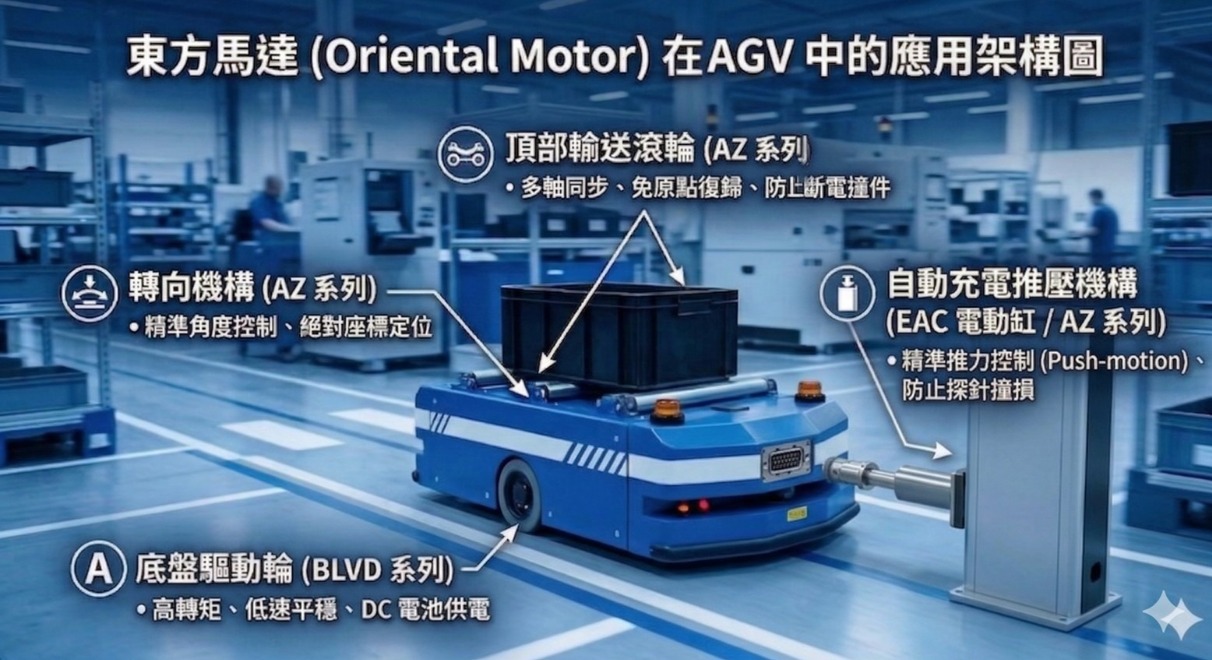
在安澤的實際輔導案例中,我們發現將底盤驅動與上方機構的馬達進行合理分工,能大幅減少後期的 Debug 時間。以下分享我們常建議的配置架構:
1. 底盤驅動輪:用 東方馬達BLVD 系列---解決低速抖動與空間限制
AGV 的底盤核心在於平順度與電池相容性。驅動輪我們通常強烈建議使用 BLVD 系列(直流無刷馬達)。
- 設計痛點:傳統馬達在低速(爬行對位時)容易產生頓挫,且體積過大難以塞入低底盤的 AMR/AGV。
- 技術解法:推薦採用 BLVD 系列(直流無刷馬達),體積大幅縮小,但在低速域的轉速控制極為平穩(速度變動率極低)。
此外,搭配高強度減速機,能輕鬆扛起數百公斤的負載,同時提供可靠的煞車鎖定,避免斜坡溜車。
2. 頂部輸送滾輪:用東方馬達 AZ 系列---省去 E-Stop 後的復歸惡夢
AGV 上方的輸送帶或滾輪,負責與機台交握(Handshake)上下料,位置記憶是稼動率的關鍵。
- 設計痛點:廠區最怕遇到急停(E-Stop)或意外斷電。傳統步進馬達復電後需要「回原點(Homing)」,但貨物已經在滾輪上,回原點的動作極易造成產品撞件或掉落。
- 技術解法:使用搭載 ABZO 編碼器的 AZ 系列(免電池絕對座標步進馬達)。它不需要電池就能記住當前絕對位置,復電後直接接續上一動,完全省去 Sensor 佈線跟回原點的時間。同時,多顆 AZ 馬達在網路通訊下的同步極佳,確保料盒平移不卡件。
3. 充電與對接機構:利用 Push-motion 取代氣壓缸
自動充電站的對接,或是需要夾取料件的機構,力道控制往往比位置控制更頭痛。
- 設計痛點:如果用傳統氣壓缸推動充電探針,力道難以精準數位化,容易把探針撞壞(探針耗損也是一筆維修成本);如果用一般馬達硬推,又會引發過載(Alarm)。
- 技術解法:導入 AZ 系列的 推壓控制(Push-motion Control) 功能。工程師可以直接在參數中設定「%數的推力上限」,馬達走到定點後會自動轉為恆定推力壓合。這不僅能補償 AGV 停靠的位置誤差,更能數位化監控接觸壓力,完美取代維護成本高的氣壓元件。
想了解更多馬達的需求,請聯繫安澤智能,預約諮詢您的最佳方案!